
UAV Navigation desarrolla el simulador Mahil para drones
La mejora en las capacidades de simulación está detrás del rápido desarrollo y optimización de la tecnología en las últimas décadas. Los vuelos reales siempre serán la confirmación final de los resultados obtenidos de la simulación, pero debe ser la simulación el caballo de batalla del desarrollo. UAV Navigation-Grupo Oesía ha desarrollado el simulador Modelo Agnóstico Hardware-In-the-Loop (Mahil), que permite a los clientes utilizar sus propios modelos de simulación.
La clave para un entorno de simulación exitoso es tener modelos que representen fielmente los comportamientos del sistema que se está emulando. El dispositivo de la empresa utiliza el modelo paramétrico Hardware-in-the-Loop.
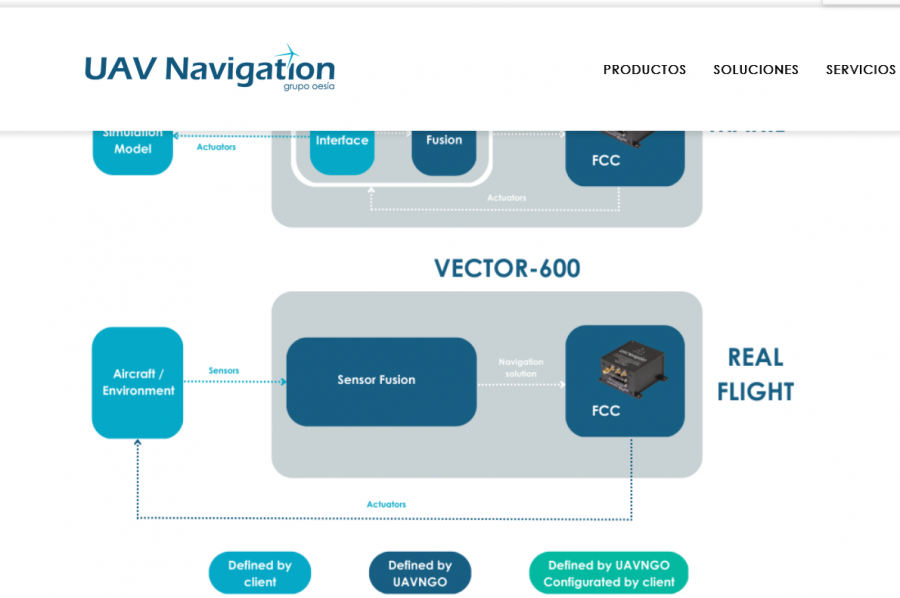
El simulador Mahil utiliza el mismo hardware con el que habitualmente trabaja el simulador UAV Navigation-Grupo Oesía HIL. En una HIL estándar, el hardware comprende dos unidades separadas: el FCC (Ordenador de Control de Vuelo) y el SIM (simulador). EL FCC es un Vector-600 equipado completamente, como el que vuela el avión real. El SIM se dedica a calcular el modelo de simulación y a la emulación de la fusión de datos de los sensores para la solución de navegación.
El modelo de simulación dede Mahil está externalizado. Se ha desarrollado una interfaz de datos UDP que permite que el HIL reciba datos de sensores del simulador externo a la misma velocidad que los recibiría de los sensores reales de un Vector-600. En la misma interfaz de datos, el MAHIL reporta el vector de control comandado por la tarjeta Vector-600 con las órdenes del actuador. La simulación externa puede calcularlos. Las lecturas de los sensores se introducen en el algoritmo de fusión de sensores patentado de UAV Navigation, lo que genera una solución de navegación para las leyes de guía y control que son usadas por el FCC, tal como lo hace el sistema real.
Versatilidad
El simulador es compatible con el software Matlab. Esta compatibilidad se ha probado en un entorno en tiempo real, lo que demuestra la idoneidad de esta configuración para obtener resultados significativos y reducir, en gran medida, la complejidad de la adaptación.
Esta configuración ofrece mucha flexibilidad pues permite al diseñador introducir cambios en el diseño de la plataforma o en su modelo de simulación física. No se requiere interacción con UAV Navigation para introducir esos cambios en el modelo, ya que se pueden desarrollar en su entorno de simulación preferido. Todo se logra manteniendo la capacidad principal de HIL ya que la lógica Vector-600 se ejecuta en las mismas versiones de hardware y software que lo harían en escenarios de vuelo reales.



